
探针台测试激光雷达LISARG与SPAD单光子雪崩发光二极管
激光雷达,Light Detection And Range, LiDAR
发射激光光束,并接收回波以获取目标三维和/或速度信息的系统;
先知道什么是电磁波波段
根据电磁波的频率可以分为:无线电波,微波,红外线,可见光,紫外线,X 射线和伽马射线;
可见光和红外线比无线电波和微波有着更短的波长,但是比 X 射线和伽马射线波长长;
光速 = 波长 x 频率;
比如一个 10 GHz 的微波雷达,可以计算出它的波长是 3 cm,称之为 X 波段雷达;
一个 1 GHz 雷达,那么它的波长为 30 cm,称之为 L 波段雷达;
常见的车载激光雷达波段在 905 nm 或者 1550 nm,目前主流的还是 905 nm,1550 nm 成本上要贵很多,但是对于人眼更安全,测距能力也更远,刚上市的蔚来 ET7 所搭载的,就是图达通的 1550 nm 激光雷达;
以下这张对比图可以看出,对于雨雪天气,905 nm 波长要好于 1550 nm 波长的;

激光雷达成像系统
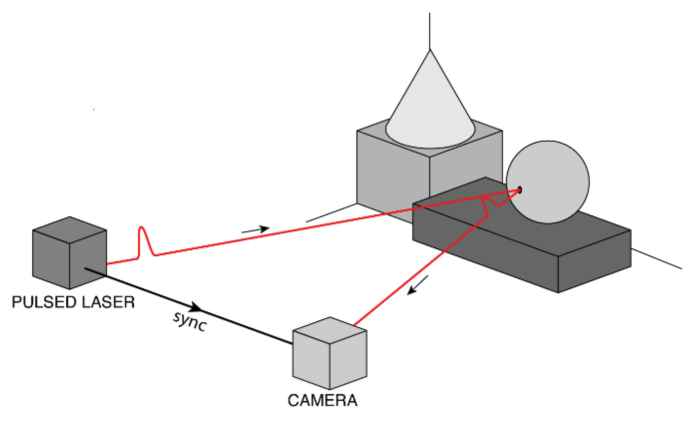
一个典型的 LiDAR 成像系统,如下图所示,激光发射器发射激光,打到物体目标,反射回来,探测器接收到回波信号,从而计算出距离和速度等信息;
激光发射器:边发射激光器(EEL),腔发射激光器(VSCEL)等,主流供应商一般是 欧司朗 OSARM,滨松 HAMAMATSU;
探测器:硅雪崩光电二极管(Si APD),单光子雪崩二极管(SPAD),硅光电倍增管(SiPM)等,主流供应商一般是 SONY,HAMAMATSU;
扫描方式:传统的机械式(电机带动激光器进行旋转),半固态的比如 MEMS 振镜方式,转镜,MMT 电磁共轭微振动等,纯固态的比如 FMCW,OPA 等;

3.4 ToF,时飞法
ToF(Time-of-flight,时飞法) 通过测量一束光穿过介质,到达目标,然后返回到检测器的时间;
这项技术不仅广泛用于激光雷达,也用于生物成像中;
和立体成像,结构光注入成像不同,ToF-LiDAR 不需要复杂的重构算法,所以可以用于实时场景;
除此之外,对于大视场角的场景,ToF 技术是最适合的而且可以保证厘米级别的精度;
TOF 分为 dToF 和 iToF,前者使用时间分辨探测器和电子设备(脉冲激光雷达)直接测量,后者通过相位分辨测量(用于连续波,即 CW-LiDAR)间接估计;
3.4.1 直接时飞法,Direct time-of-flight,dToF
脉冲激光雷达,利用 dTOF 方式,测量激光束发出,穿过介质,到达目标,返回到检测器的时间;
通过飞行的时间,就可以轻松的计算出距离信息;
该技术需要短(通常 <1 ns)激光脉冲,高带宽探测器,具有亚纳秒分辨率和时间抖动的定时电子设备;
脉冲激光雷达中,电子设备的分辨率直接影响到深度信息的分辨率;
FSR 的距离仅受限于发光的功率,目标的反射率和定时电子设备;
出于这样的原因,脉冲激光雷达在某些长距场景下得到广泛应用;
脉冲激光雷达需求和挑战
激光雷达的性能指标往往关注 FSR,精度,FOV,角分辨率和处理速度,除此之外,户外情况下对于强背景光干扰的处理,人眼安全和激光雷达之间的抗干扰;
就 FSR 来言,激光雷达系统分为
短距(几米范围,比如 AR 游戏)
中距(几十米,比如工业自动化中)
长距(几百米甚至到几百公里,比如自动驾驶和卫星探测)
长距可以通过脉冲激光雷达技术,与高功率激光器、具有单光子灵敏度的探测器,和具有足够 FSR 的定时电子设备 (TDC) 相结合来实现;
脉冲激光雷达中,测量精度受 TDC 分辨率(即 LSB)和门窗之间的最小可行延迟偏移的强烈影响,因此 FSR 与精度相互制衡;
除此之外,可以通过获取更多到达时间,然后再重复多次测量中计算出均值来提高精度;
FOV 和角分辨率取决于扫描速度和扫描数目,对于 Flash-LiDAR,取决于像素数目;
获取速度,对于实时应用来说一个十分重要的因素,也与 FOV 和角分辨率有关;
事实上在扫描系统中,FOV 和角分辨率越好,处理速度就越慢;
Flash-LiDAR 中也有类似的性能权衡,因为给定激光源的功率,更大的 FOV 和更多的像素数目会导致,每个像素的光子更少,从而需要进行更多次的重复测量;
对于高帧率的脉冲激光雷达,尽可能多的光子需要被检测到,然后打上时间戳,因此获取速度也影响着整体的检测效率;
动态范围 / Dynamic Range, DR 对于检测系统来说是一个很大的挑战,尤其是在强背景光下(例如,室外有太阳光照),和距离非常不同,且反射率和角度变化极大的不同目标时;
除此之外,背景抑制 / Background Rejection(比如如何在返回的信号中过滤掉背景光)对于高性能激光雷达来说,是一个关键因素;
脉冲激光雷达探测技术
6.1 通用的探测器
1. 电荷耦合元件(Charge-coupled devices, CCDs)
电子倍增 CCDs(Electron-multiplying CCDs, EM-CCDs)
增强 CCDs(Intensified-CCDs,I-CCDs)
2. 雪崩光电二极管(Avalanche photodiodes,APDs)
3. 单光子雪崩二极管(Single photon avalanche diodes, SPADs)
4. 硅光电二极管(Silicon photomultipliers, SiPMs)
Analog SiPM, a-SiPM
Digital SiPM, d-SiPM
雪崩光电二极管 APD 目前比较成熟,也是目前激光雷达主流的探测器选择
激光雷达中常见的 SPAD 和 SiPM 探测器
近些年来,许多公司(比如丰田,ST 半导体,索尼,松下,ON 半导体, Ford-Argo)都在开发激光雷达所需要的 SPAD 和 SiPM 阵列;
2013 年丰田公司在日本对外发布了,用于脉冲激光雷达的 SPAD 传感器,基于 32 个宏像素的线性阵列,每个宏像素包括 12 个用于光子符合检测的 SPAD, 和还包括用于 TOF 处理的片上数字信号处理器 (DSP) ;丰田还在为 LiDAR 开发性能优化的 SPAD 探测器,特别是具有增强的红色探测效率;
ST 半导体在法国开发了一种高性能 3D 堆叠技术,具有用于 SPAD 的 背照式(Back-side illuminated, BSI) 顶层,连接到与前端传感和数字处理的,一个高压 40 nm 的 CMOS 底层;
收购 SensL 之后,安森美半导体为激光雷达开发研发 SiPM 和 SPAD 阵列;第三代激光雷达成像系统基于 1x16 模拟 SiPM 阵列,适用于有阳光的户外场景,支持到 40 m 的 FSR;安森美半导体首款 SPAD 阵列(400 x 100 像素)“Pandion”,针对于大视场角的激光雷达设计;
日本松下向外界发布了目前最大的 SPAD 阵列(1200 x 900 像素),适用于高达 250 m,10 cm 分辨率的长距离激光雷达,混合 dTOF 和 iTOF 架构;模拟像素基于使用 BSI CMOS 图像传感器 (CIS) 技术制造的垂直 APD (VAPD),由于垂直电流和模拟前端,与标准 SPAD 相比,提供更小的像素尺寸 (6 µm);
最近日本索尼发布了一个基于 189 x 600 像素 SPAD 阵列(基于 3D 堆叠技术,其中包括用于 SPAD 的 90 nm BSI 层和用于数字逻辑的 40 nm CMOS 层)的完整 MEMs 激光雷达系统;索尼这款 LiDAR 系统,面向汽车应用,具有 300 m FSR 和用于太阳背景抑制的微像素逻辑;
Princeton Lightwave 公司开发了一种用于 1550 nm 波长激光雷达的 InGaAs / InP SPAD 阵列,32 x 32 像素,通过热电冷却来进行冷却,以较低探测器噪声;
下图中总结了用于 LiDAR 的商用硅 SPAD 探测器的最新趋势:可以看出,SPAD 阵列的像素数量不断增加,而 a-SiPM 阵列的像素数量要少得多;
由于 InGaAs/InP 技术远不如硅成熟,所以没有进行对比;
